Due to limited on-board processing and communcation abilities, VBAP is conducted on shore. New waypoints can only be received by each glider while they are on the surface, thus the effective feedback interval of VBAP is limited by the cycle time between each surfacing. Furthermore, waypoint sets must be available for each glider immediately at surfacing introducing latency since the latest glider positioning and current estimate information is unavailble for feedback until the next planning cycle. Variabilities across the glider fleet such as currents with strong vertical components and the local bathymetry cause surfacing asynchronicities which also complicates coordination.
Latest Results: 3 Glider Estimated Gradients (08/08/03)
Current Results:
Coordination of 3 autonomous underwater gliders.
On August 6th and 7th we had an opportunity to coordinate three underwater gliders. After the two glider experiment (with gliders WE12 and WE13) completed on August 5th, the participating gliders were placed on a hold mission where they held station. A third glider, WE07, already on a preprogrammed transect was tasked to the adaptive sampling team and we obtained control after it came within a few kilometers of WE12 and WE13.The mission objective was to have the gliders configure themselves into
an equilateral triangle with a 3km edge length while traveling in a north-west
direction. Half-way through the experiment, orientation control was enabled
which rotated the group for better coverage along the group's direction
of travel. Since at the present we have no control over the glider's motion
in the vertical plan, the formation is defined as projected onto the horizonal
plane. The gliders were programmed to dive to 100m and surface every two
hours, at which point they received the next VBAP plan. The experiment
was conducted for roughly 16 hours.
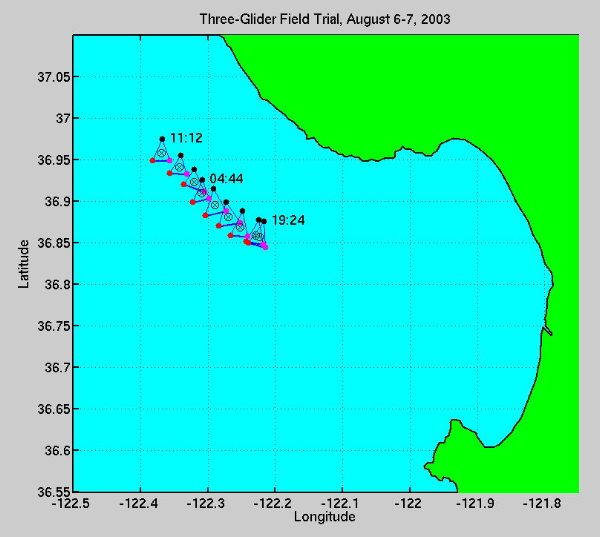

Figure 1. Snapshots in time of the formation.
Figure 2. Performance metrics for the 3 glider experiment. Range is
inter-glider distance, angle is with respect to WE12 (the trailing glider),
and VMG is velocity-made-good which is the magnitude of the group's velocity
projected onto the vector directed towards the group's destination.

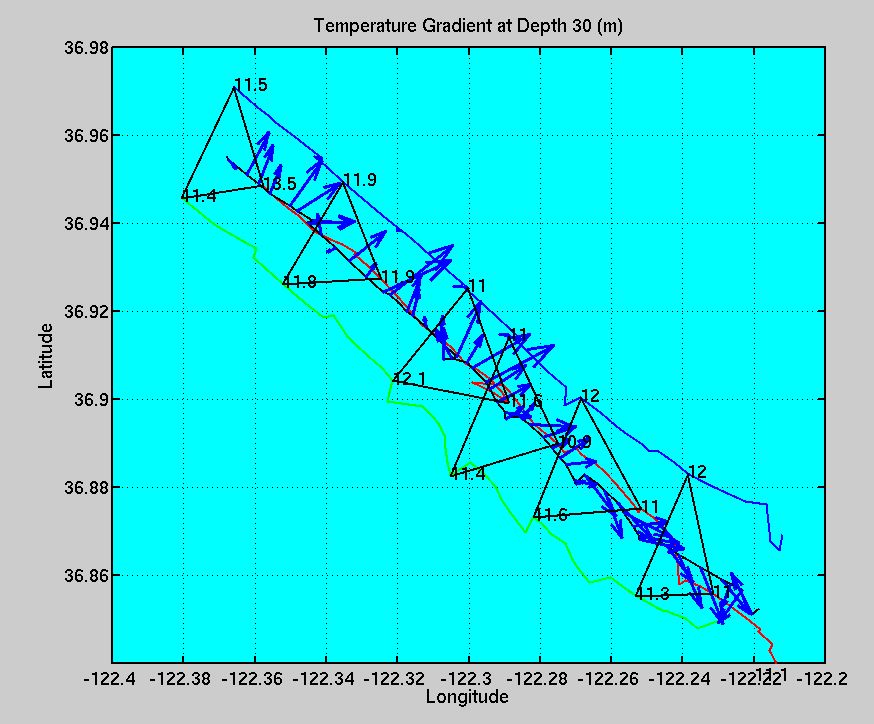
Figure 3. Least-squares estimated (negative) gradients along formation
trajectory at 5m and 30m depths. At both depths, the gradinents indicate
colder water toward the north-east.
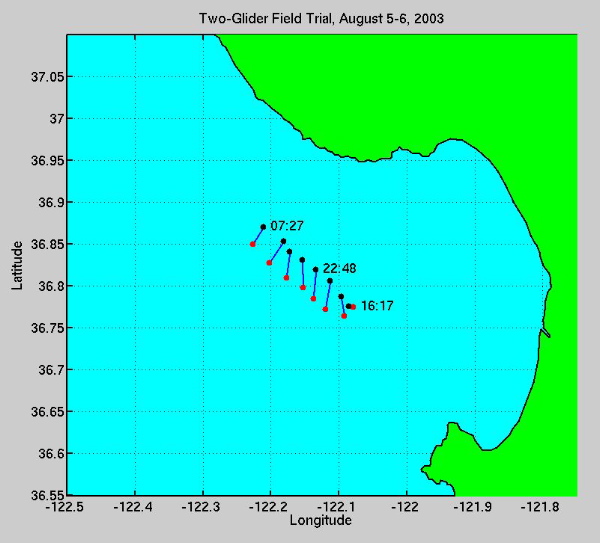
Coordination of 2 Autonomous Underwater Gliders
Using our coordination strategies, two autonomous underwater gliders roughly 0.5 km apart are directed to travel in a northwest direction while achieving an inter-vehicle spacing of 3 km with an orientation of 45 degrees with respect to a vertical axis. Due to communication problems, current estimates were corrupted during several cycles which are seen to hurt performance. However, once these problems were fixed, the group approaches the desired configuration.